|
The Kautham Project
4.3.3
A robot simulation toolkit for motion planning
|
|
The Kautham Project
4.3.3
A robot simulation toolkit for motion planning
|
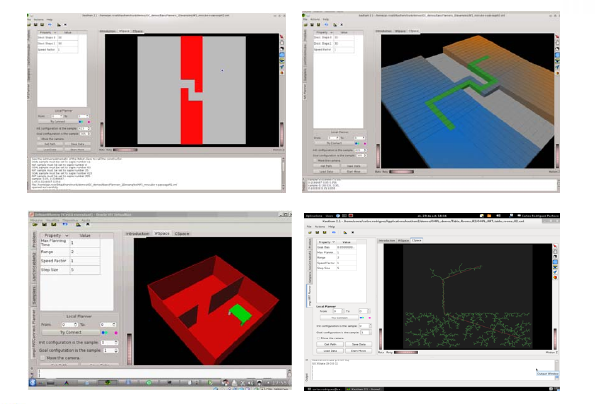
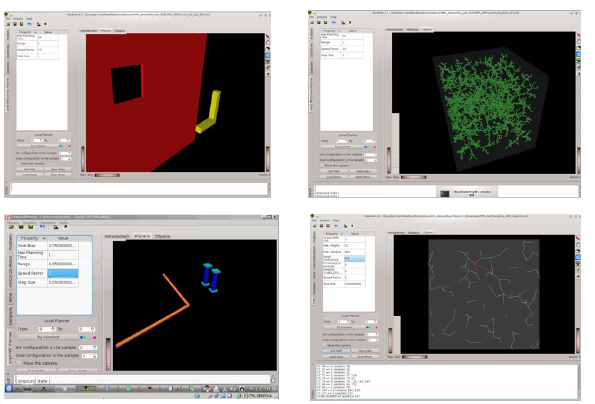
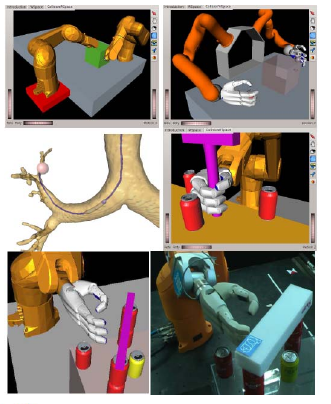
The Kautham Project is a software tool developped at the Service and Industrial Robotics (SIR) group of the Institute of Industrial and Control Engineering (IOC) of the [Universitat Politècnica de Catalunya] ( http://www.upc.edu (UPC), for teaching and research in robot motion planning. The tool allows to cope with problems with one or more robots, being a generic robot defined as a kinematic tree with a mobile base, i.e. the tool can plan and simulate from simple two degrees of freedom free-flying robots to multi-robot scenarios with mobile manipulators equipped with anthropomorphic hands. The main core of planners is provided by the Open Motion Planning Library (OMPL). Different basic planners can be flexibly used and parameterized, allowing students to gain insight into the different planning algorithms. Among the advanced features the tool allows to easily define the coupling between degrees of freedom, the dynamic simulation and the integration with task planers. It is principally being used in the research of motion planning strategies for dexterous dual arm robotic systems.
Service and Industrial Robotics (SIR)
Institute of Industrial and Control Engineering (IOC)
Universitat Polirecnica de Catalunya (UPC)
Barcelona, Spain
Version 1.0 was developed in collaboration with the Escuela Colombiana de Ingenieria "Julio Garavito" placed in Bogota D.C. Colombia
Contact: Prof. Jan Rosell (email: jan.rosell@upc.edu)
Webpage: sir.upc.edu/kautham
Paper: The Kautham Project: A teaching and research tool for robot motion planning (pdf)
 1.8.17
1.8.17